Wolfpack – コンボイ攻撃の完全なチュートリアル

このガイドを忠実に実行すれば、最初のミッションで船を沈めることができます。探知を回避する方法、攻撃位置に移動する方法、護送船団の進路と速度を決定する方法、発射するたびに目標を見つける魚雷を発射する方法を順を追って説明します。
私のテストセッションからの「ゲーム内」データを使用して、段階的なプロセスに従うことができます.航続距離、方位、速度、船団の進路は、このガイドに記載されている数値とは明らかに異なります。
設定と資格
使用する設定は次のとおりです。ビスケー湾、1940 年、簡単、2100/2130 時間。ボットを有効にします。近接遭遇を有効にします。
これにより、シナリオの開始時に船団が後ろのどこかにいる状態で、半分の速度で水面に出ます.
このガイドは、「ボット」オプションを使用して潜水艦を操作することにすでに慣れていることを前提としています。このガイドでは、次の主題について説明します。魚雷攻撃を成功させるには、さまざまな操作と概念を理解する必要があります。
- 船団の進路を決定する「キングポスト」方式を理解する必要があります。
- 識別マニュアルに精通し、個々の船を識別できる必要があります。
- ストップウォッチを使用して、個々の船の速度を測定できる必要があります。 (長さ/秒 x 1.94=小数点以下第 1 位までの速度)
- ターゲット データ コンピューター (TDC) コントロールのすべてを操作できる必要があります。このガイドでは、テキストの後半でドープを入力するための段階的なプロセスを説明します。 (あなたが忙しく収集しているスピードとコースの情報をドープしてください) TDC コントロールを設定できることは、それを操作している人にデータが渡されたときに適切な解決策を入力するために知っておく必要があるすべてです。
- 正確な範囲を決定するために、垂直方向のセンチラジアンを揃える方法を理解できなければなりません。このガイドでは、知っておくべきことをすべて別のセクションで説明しています。
- 船首の角度を設定できる必要があります。このガイドでは、別のセクションで概念について説明します。
ベアリングと磁気ベアリング
見出しと方位に関しては、適切な用語について議論が激化しています。磁気的または相対的。純粋主義者は、Wolfpack で誰かがあえて「磁気」という言葉を不適切に使用すると、特に憤慨します。
幸いなことに、ウルフパックの世界でアームチェア サブマリーナーが使用している他の用語や定義は気にしません。このガイドでは、磁気はチャートまたはゲーム世界の北を指します。方位とは、潜水艦からの角度を意味します。
- ターゲットが私たちの右側にある場合は、90 度の角度で見るように指示します。
- キングポスト方式でターゲット コースを決定する場合、90 度の磁気、または攻撃スコープで読み取っていた磁気方位、ボトム テープを呼び出します。
ご覧のとおり、両方の用語に用途があります。このガイドを読んでいる人は、ジャイロコンパスと磁気偏角について独自の研究を行うのに十分なほど頭が良く、このガイドが磁気という用語を定義された目的で使用していることを理解できることを知っています。動く標的。詳細を知りたい人は、用語の適切な使用法をすぐに利用できます。
気分を害したドイツ海軍のすべてのメンバーに謝罪します.
範囲の決定
ターゲットまでの範囲を決定する方法を新しいプレーヤーに説明する方法を、さまざまな方法で人々が説明しているのを聞いたことがあります。
私は自分のやり方でやっていますが、他のプレイヤーは別の方法を持っているかもしれません。正確な数値を取得するのに役立つものは何でも重要です。
これが私の方法です
- ターゲットを選び、どのマストに焦点を合わせるべきか、そのマストの高さを把握してください。
- 中心の水平潜望鏡ラインをターゲット船の底の喫水線に正確に置きます。
- 喫水線とは、船の底と水が交わる場所を意味します。船底に赤または銅色の帯が見えます。これはプリムソールラインであり、このガイドの目的のための船の底です.潜望鏡の水平中心線を喫水線に置き、測距に使用しているターゲット船のマストに沿って垂直センチラジアン ワイヤーを合わせ、中心線/喫水線からターゲット マストの上部までのセンチラジアンの数を数えます。一斉にワイヤーを並べる練習をする必要があります。センチラジアン線を特定の数字に「希望」しないでください。これは、水平の喫水線に細心の注意を払い、センチラジアンを数える前に実際に喫水線上にあることを確認することを意味します.私はしばしばこの間違いを犯していることに気づき、それを認識し続けようとします. 「人は自分の限界を知らなければならない」クリント イーストウッド、マグナム フォース
- 簡単な計算を行うと、ターゲットとする船の射程が得られます。
式: センチラジアンの数 / マストの高さ x 4 (潜望鏡が拡大された場合)。拡大されていない場合は x4 のステップを省略します。
- この数値は、TDC 入力の範囲です。
- これでターゲットの範囲を設定できます。
船首の角度

Angle on Bow に関するひどい説明があちこちに出回っています。たくさんあります。
弓のアングルは必要以上に複雑です。これは最も基本的でシンプルな概念であり、多くの人がこれに問題を抱えていることに驚かされます。私の説明を読んだら、理解の波が押し寄せてくるのを感じるでしょう.
- ターゲット データ コンピューターに移動し、ステーションをクリックまたは入力します。
- 左下隅にある緑と赤の図を見てください。その図は、抽象的なターゲット船です。緑色の側は、船の右舷/右側を表します。赤い面は、船の左舷/左舷を表します。明らかに、TDC で見ている緑と赤の船の図は、「上」または北を向いています。
- Angle On Bow の針はあなたの潜水艦です。針の先はあなたの潜水艦です。
- それほど複雑ではありません。
- 船の右側を見ている場合、TDC は船首右になります。
- 船の左側を見ている場合、TDC は船首左になります。 AOB が適切に計算され、データを TDC に入力すると、あなたや他の船がどの位置に移動しても、AOB は常に適切に設定されたままになります。
- あなたが船の後ろにいる場合、TDC の針は船の後ろにあります。船の前にいる場合、TDC の針は船の前にあります。
AOB設定入力はTDCを右上の「AP」に設定します。アングル・オン・ボウの決定には攻撃潜望鏡を使用してください。コースを解く必要がないため、底の磁気テープがこのステップに役立ちます。
ターゲット船が正確に北に向かっていて、西を見ているとします。船の進路は 360 度の磁気です。攻撃用潜望鏡を磁気方位 270 に配置し、船首の角度を右 90 度に設定します。
対象の船が 90 度の磁方位にあり、あなたが船の右側にいる場合、潜望鏡を 360 度の磁方位に振り、AOB を 90 度の船首右に設定します。
対象の船がどのコースにいても、適切な AOB 設定に到達するには、90 度を足したり引いたりする必要があります。他の方法ですが、私は潜望鏡を使用します。正確な読み取りと設定ができる限り、使用する方法は重要ではありません。
この部分を読んだ後、私はおそらくあなたと同じくらい混乱しています.要するに、Angle On Bow の概念と、使用するオプティクスの情報を TDC に適切に入力する方法を学ぶ必要があります。私は常に攻撃用潜望鏡を使用しますが、ブリッジ上の UZO または観測用潜望鏡を TDC に設定し、選択した光学系から魚雷を発射することができます。
最初のターン
スポーンするとすぐに水面に浮上し、約 12.4 ノット (ハーフ スピード) で移動します。車列はあなたの後ろのどこかにいます。
- はしごに行き、司令塔に登ります。攻撃用潜望鏡に乗り、船団に向けて振り回し、船団の中心付近にある磁気方位 (下部読み取りテープ) を見つけます。磁気方位が何であれ、潜水艦をその船首方位に向け、完全に前進します。何号でも構いません。この時点で重要な動きは、車列に向かってまっすぐ進み、範囲を狭めることです。
- さあ、半速で進みましょう。船は約 6,000 メートル離れており、速い速度で接近します。
- 次に、機首に直接整列できる最も近い船を見つける必要があります。
- 潜望鏡をゼロに設定し、ボット オプションを使用すると、ラダーでボートを操縦できます。
- 並んでいる船から目を離さずに、ブリッジの舵を使って操縦することもできます。
- 操縦できる最も近い船との直接衝突コースにできる限り近づき、目標の船とは正反対の 180 度の方向に向ける必要があります。必要に応じてゆっくりと来てください。ある程度の練習を積めば、すぐに船を整列させ、ラダーを付けて船首の角度をゼロに保ち、船の中央で船に向かって移動できるようになるはずです。舵を中心に合わせた後に船が左右にドリフトする場合は、コースを修正して、使用している光学機器のワイヤー上で船を同じ位置に保つ必要があります。この手順は、非常に正確である必要がないため、大まかな読み取りにすぎません。これは迅速に行う必要があり、船団の進路にできるだけ垂直に近い方向に向けて、しっかりと準備を整えておく必要があります。
- 船の閉鎖を続け、この段階で護衛を探します。これらの設定では、どの船からも簡単に 1000 メートル以内に入ることができ、検出されないため、右に 90 度旋回する準備をすること以外は心配する必要はありません。順番を変えた後、すぐ左側に護衛がいる可能性があります。彼の進路に直接入ることは避けたいと考えています。
この操作を実行している間、船団全体をスキャンするための十分な時間があります。船をスキャンして、通常船団の中心にある価値の高いターゲットの概要を把握してください。あなたの攻撃は船団の左側から行われるので、右側と中央右側の船があなたが探しているものです.現時点では、実際の船の識別を行う必要はありません。ただし、セットアップと攻撃のこの段階では、このガイドは実際には必要ないため、できるだけ早く特定を開始します。船の位置を心に描いておくと、攻撃実行中に空間内の位置を視覚化するのに役立ちます。角度とビューはまったく異なり、混乱します。フォローしている場合は、数分で表示されます。
2 ターン目と 3 ターン目
対象の船に整列し、船首方位は 180 度です (このガイドでは、これから提供されるすべてのデータは、実際の船団のアプローチと攻撃に関するものになります)。船団のコースは 360 度です。繰り返しますが、これは大まかな数字です。
- では、右に 90 度旋回し、船首を 270 度にします。いっぱいに進みます。
- ここでの目標は、護送船団の船の左側の列の外側に走ることです。
- 光学機器を使用して、船の方向が約 260 度になるまで船の列を通過します。
言い換えれば、邪魔にならないようにして、進行方向 270 度を保ちながら、トラックから約 2000 ~ 3000 メートル離れた左側に寄ります。
あなたの前または左にいるエスコートの位置を認識することが非常に重要です.船の進路を十分にクリアしていることに満足したら、左に 90 度旋回し、進行方向を 180 度に設定して距離を縮めます。ここでの目標は、船団のほぼ後方に到達し、左折の準備をすることです。
このステップでは、護衛を意識することが最も重要です。外側の護衛と護送船団の間を十分に移動できます。よりハードな設定では、エスコートが車列の内側に近く、トラックの外側に配置されます。このガイドと設定では、おそらく多くのエスコートは表示されません。その場合、1000 メートル以内に簡単に近づき、検出されないことを覚えておいてください。
アプローチのこのフェーズでは、Kingpost 法を使用してコンボイの正確なコースを取得します。これには攻撃範囲を使用し、船団の進行方向を今すぐ計算して、3 ターン目に向けて操縦するコースを用意します。もちろん、アプローチのこの区間では、快適な速度設定を使用できます。速度を落としたり、ドリフトしたりすると、Kingpost の読み取りに役立ちます。
車列の後方に近づいたら、車列に向かって左折し、Kingpost 法で先に計算した方位に来てください。
コンボイの基地コースに落ち着いたら、TDC を AP に設定し、攻撃ペリスコープを 90 度に振り、Angle On Bow を左に 90 に設定します。このステップでは、底面の磁気ベアリングを使用しないでください。上部の相対ベアリング テープを使用してください。
これで、攻撃の準備がほぼ整いました。輸送隊の速度を決定する必要があります。
コンボイ速度
ここで、孤立した船、または船首と船尾がペリコロープ ワイヤーを横切っているのがはっきりと見える船を選び、それを特定する必要があります。ボートを完全に停止させます。多くの方法があり、停止方法は重要ではありません。ナビゲーター テーブルには、正確にいつ 0 ノットかを知りたい場合の速度表示があります。
船の時間を計り、護送船団の速度を取得します。私は通常、2 隻の船を 2 回計測して、正確な読み取りを確認しています。
攻撃角度
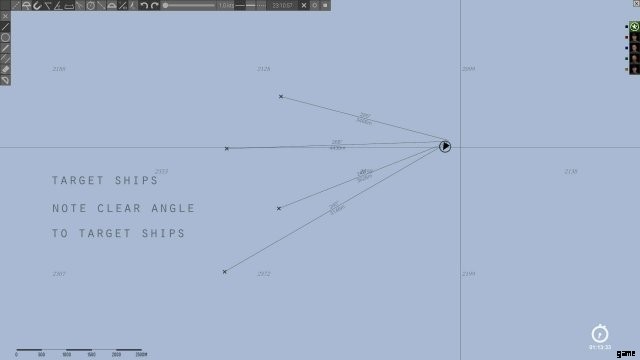
これで焼成溶液に必要なドープがすべて揃いました。この時点で、船首の目標速度と角度を TDC に入力する必要があります。スクリーンショットは、私が 4 ショットの位置に着く方法を示しています。ターゲットがあなたの後ろにいることはできないことを知っておくことが重要です。魚雷のジャイロ角度は右 90 度以下。このガイドでは、2 つのターゲットのみを設定しています。コンセプトは同じだけど。明確な発射角度が必要です。ここでの目標は、船団の基本コースに正確に沿って潜水艦を操縦し、速度を速くしたり遅くしたりして、2 隻の船が船首から船尾まで明確になり、これらの船に魚雷を発射する経路に喫水が深くなる船がなくなるようにすることです。
つまり、2 つのストレート ショットが必要です。最初の魚雷ターゲットの喫水が 8 メートルで、4000 メートル離れている場合、喫水が 8 メートル未満である限り、誤って魚雷の進路に侵入して攻撃を台無しにする可能性のある船の下を撃つことができます。魚雷が偶発的に命中する可能性がないことを確認してください。そうする前に船団に警告が発せられることはありません。
攻撃角度に満足したら、コンボイにできるだけ近づけて「速度を合わせる」必要があります。このステップと実際の魚雷発射段階では、船団よりもわずかに遅いか速いことが実際には理想的です。わずかにとは、ノットの 10 分の 5 未満を意味します。このステップを完了すると、発射する準備が整います。
射撃と魚雷着弾のタイミング
あなたは現在、護送船団のコース上にあり、あなたの速度は、アプローチで設定した 2 つの目標よりも 10 分の 2 ノット以内です。これで、両方のターゲットのマストの高さと喫水が手元にあるか記憶されているはずです。両方のターゲットに範囲を取ります。各範囲の TDC を設定し、魚雷が発射された時間を記録します。
- 目標は 4000 メートルで、魚雷の実行時間は 4 分です。
- ターゲット 2 は 3500 メートルにあり、魚雷の実行時間は 3 分 30 秒です。
ターゲットよりも速いか遅いかがわかります。速ければ、ターゲットのセンチラジアン カウントが増加します。この目標範囲の減少を予測し、将来の範囲の TDC を設定したいと考えています。ターゲットが選択したセンチラジアンの「ワイヤーを横切る」とき、潜望鏡の垂直中央ワイヤーをターゲットの中心に合わせて発砲します。潜望鏡をすばやく 2 つに向けてスイングし、範囲を確認して TDC を新しい範囲に再設定します。 30 秒の時点で、ワイヤを船の中央に配置して発砲します。
言い換えれば、ターゲット 1 が 3800 メートル離れていて、私たちが彼よりもゆっくりと速く進んでいる場合、TDC を 4000 メートルに設定し、センチラジアン カウントの増加を監視して、設定した範囲に船が「来る」のを待ちます。船上で獲得するにつれて、望ましい値に。船が適切なセンチラジアンに達したら、スコープを船の中心に戻し、発射します。 2 番目のショットでは、先にまたは後ろに操縦するため、以前の測定値からタイミングがわずかに変わる場合があります。ただし、時間は非常に近いため、それらを使用するか、2 番目の魚雷の実行時間に注意して、それに応じて発射時間を調整することができます。あなたの目標は、同時またはそれに近い影響を与えることです。このようにして、先に聞いた衝撃によって警告された場合、船は回避する方法がなく、彼は向きを変えて、あなたが慎重に取り組んだ目標ソリューションを台無しにします.
発砲後、全速力で前進し、護送コースから約 90 度方向転換します。
魚雷が命中する直前に電気エンジンに切り替え、ブリッジから双眼鏡で見ながら爆発音を聞きます。
この方法で 2 隻の船を攻撃すると、同じ手順で 3 隻または 4 隻を攻撃できるようになります。
衝突後の回避
- ガイドに厳密に従っていれば、検出範囲から十分に外れているはずです。
- 衝突音を聞きながら全速力で走り、車列や護衛隊から離れてください。
- もしあなたが発見されたら、深く潜ってください。あなたがエスコートで有利なスタートを切ることで、彼らがあなたの位置に着くまでにあなたを見つけることは決してないでしょう.
- 護衛があなたを攻撃している場合は、常に車列から背を向け、反対方向に向かいます。あなたが離れた場合、彼らは攻撃を中断して護送船団に追いつきます。私がその地域にとどまろうとすると、彼らは私を永遠に追い詰めているようです.
このガイドに従った場合、少なくとも最初に撃った船を沈めなかった理由はないはずです。すべてのステップに慣れると、複数のヒットを取得することが第二の性質になります。水面にとどまることの利点は、船団の基地コースの前を走り、船団が落ち着くずっと前に第 2 の攻撃の準備を整えることができることです。護衛を避けるために必要な場合にのみダイビングしてください。表面攻撃ははるかに簡単です。